Découvrez le résumé de thèse de J. LANGENBACH, le Lauréat 2022 du Prix étudiant SFIP
27 janvier 2023“Vitrimères pour la robotique souple“ par Jakob Langenbach
La robotique souple est une branche émergente de la robotique qui à la différence de sa version classique se tourne vers l’utilisation de matériaux souples, les élastomères. L’ajout d’élastomères dans les dispositifs robotiques permet une meilleure flexibilité et adaptabilité à l’environnement que leurs homologues rigides et peu déformables (souvent métalliques). Les robots souples ont donc des applications variées et complémentaires à la robotique classique, comme la manipulation d’objets fragiles (qui pourraient être endommagés par des matériaux rigides) ou interagir avec l’Homme en toute sécurité. Cependant, la perte de fonctionnalité du robot après des dommages matériels est une préoccupation majeure, qui est favorisée par la nature non rigide des composants. Pour résoudre ce problème et augmenter la durée de vie du robot, l’utilisation d’élastomères auto-cicatrisants (AC) est une solution prometteuse. Les polymères AC sont des réseaux polymères qui peuvent « guérir » les dommages grâce à des liens dynamiques/échangeables qui peuvent être basés sur des interactions physiques, chimiques ou les deux.
En plus de sa capacité de guérison, le robot doit être également capable de détecter les dommages causés à ses composants élastomères. Par conséquent, il est nécessaire de les équiper d’un système de détection, par exemple des capteurs de déformation piézo-résistifs, dont la résistance électrique varie en cas de déformation.
Dans le cadre de cette thèse (Projet Européen SHeRo FET 2020), nous avons initialement intégré des capteurs de déformation dans des matrices polymères auto-cicatrisantes par soudage thermo stimulé (Figure 1a). Pour la matrice polymère AC, une chimie époxy-acide combinée à une approche supramoléculaire, deux méthodes largement maîtrisées au laboratoire, a été employée. Les premiers travaux ont démontré que la différence de rigidité entre la matrice souple et la fibre plus rigide était un paramètre primordial en vue de l’intégration de cette dernière (Figure 1b). En effet, un phénomène de cavitation conduisant à la rupture prématurée de la fibre a été observé (sous polariseurs croisés, voir Figure 1d) lorsque la différence de rigidité était trop importante. En introduisant le monomère époxy en excès, qui est capable de former des liaisons éthers non échangeables, la rigidité de la matrice AC a pu être modulée de sorte que le composite capteur-fibre résiste à une charge cyclique sans rupture de la fibre du capteur (Figure 1e).
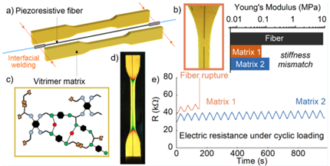
Figure 1. Intégration de capteurs de déformation dans un réseau auto-cicatrisant par soudage thermo-stimulé et adaptation de la rigidité de la matrice AC pour améliorer les performances des fibres des capteurs à 50 °C. c) Matrice AC: monomères époxy bi-fonctionnels (vert), tétra-fonctionnels (bleu), liaisons hydrogène (jaune), liaisons éther non échangeables (points rouges).
Cependant, ce système initial (utilisant des époxy moléculaires) a montré une réponse élastique retardée lors des mesures de traction cyclique en raison d’une température de transition vitreuse (Tg) trop proche de l’ambiante. La même chimie mais cette fois-ci appliquée au caoutchouc naturel époxydé (ENR) a permis d’abaisser radicalement la Tg et d’obtenir un retour élastique quasi-instantané après relâchement de la contrainte, comme en témoignent les expériences cycliques. Pour des plages de déformation moyennes, typiques des applications robotiques, une seule minute de cicatrisation à température ambiante est suffisante pour retrouver les performances cycliques de l’échantillon original. Le mécanisme d’autoréparation, multiple, est basé sur une combinaison d’interactions faibles (liaisons hydrogène et diffusion des chaînes polymères) et de points de réticulation échangeables (liaisons covalentes dynamiques). Finalement, un prototype d’actionneur a été produit par moulage par compression dans un processus n’utilisant aucun solvant, une grande majorité de réactifs biosourcés (plus de 98% en masse) et est adaptable à l’échelle industrielle.
Pour aller plus loin et rendre le robot totalement auto-cicatrisant, les capteurs eux-mêmes doivent capables de se réparer, à l’image du système nerveux d’un organisme vivant. Cela a été permis en introduisant des particules de noir de carbone conductrices dans une matrice élastomère ENR auto-cicatrisante décrite ci-dessus. Des fibres minces composites avec différentes charges de noir de carbone ont ainsi été produites par moulage par compression puis découpe laser. Grâce aux divers mécanismes d’autoréparation et une excellente dispersion des particules de carbone, les composites contenant plus de 5 % massique de noir de carbone présentaient une conductivité électrique et étaient toujours autoréparables. Les essais de traction cyclique ont montré un comportement linéaire de la déformation et de la résistance de la fibre du capteur de déformation, qui peut être reproduit après découpe et auto-cicatrisation (1 h à 180 °C) du composite capteur-fibre. Par conséquent, ces capteurs permettent de mesurer la déformation ou les dommages éventuels du robot souple et peuvent également se réparer eux-mêmes après un dommage.
Finalement, pour diminuer la température de cicatrisation de ces matériaux auto-réparants en utilisant des réactifs toujours plus « verts », nous nous sommes tournés vers une approche de catalyse enzymatique (Figure 2). Pour ce faire, une enzyme (Lipase TL) a été utilisée comme biocatalyseur pour accélérer la réaction de transestérification (échange entre deux groupements esters) à des températures plus basses et ainsi réduire la température de guérison ou de recyclage. Des études de RMN du proton combinées à des mesures d’activité enzymatique sur des molécules modèles ont permis d’élucider le mécanisme d’action des enzymes ainsi que les conditions optimales d’obtention d’un matériau. En choisissant ces conditions spécifiques, des matrices auto-cicatrisantes contenant des enzymes toujours actives pour la transestérification ont été obtenues. Ces matériaux originaux ont démontré des capacités de cicatrisation à des températures basses (≤ 100 °C) associées à une activité rivalisant avec les catalyseurs organiques classiques.
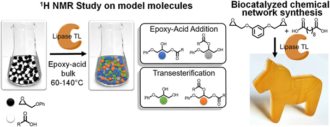
Figure 2. Étude RMN sur des molécules modèles de la synthèse de matériaux auto-cicatrisants basés sur la chimie enzymatique.
Journée technique – Conférences & Exposition – Techniques d’analyse avancée des polymères